
Leaderboard
Quick links: | Submission | Explanation Evaluation
| Rank | Score | Task | Algorithm | Images | Submitter | Date | Packing Plan |
|---|---|---|---|---|---|---|---|
| 1 | 0.724553 | Offline 3DBP | sisyphus |

|
F. Kagerer | 2022-12-05 | |
| 2 | 0.197204 | O3DBP | Online-3D-BPP-PCT |

|
F. Kagerer | 2022-11-25 | |
| 3 | 0.067303 | LAHCSISR | banpu |
|
K. Puphaiboon | 2025-10-28 | |
| 4 | 0.020356 | O3DBP-3-2 | heuristic O3DBP-3-2 |
|
F. Kagerer | 2023-02-19 | |
| 5 | 0.010930 | Offline 3DBP | xflp |
|
F. Kagerer | 2022-12-04 |
Description of Tasks
This section briefly describes the tasks for which BED-BPP is used. For a detailed description of the dataset, please read our publication.
-
Offline 3DBP
The solver obtains all items that have to be packed. The solver is allowed to change the sequence of the items arbitrarily, i.e., the item sequence in the resulting packing plan might differ from the item sequence in BED-BPP. -
O3DBP - Online 3DBP
In online three-dimensional bin packing, the solver must pack the items in a given, fixed sequence. This task can be interpreted as a three-dimensional version of the video game Tetris. -
O3DBP-p-s
In this task, the solver knows the nextpitems and can select one of the nextsitems to place next. In general, for integersp,sit holdsp>=s.
Submission
If you click on the link above, a new tab opens with a file request of Dropbox. There, please upload two files:
-
Author Information (example_author_information.txt)
This .txt file contains information about the author such as the name of the submitter, the e-mail address and the filename of the submitted packing plan. -
Packing Plan (example_packing_plan.json)
This .json file contains the list of actions for each order of the BED-BPP. An action contains information about the placement, the item and its orientation, e.g.action = { "flb_coordinates": [0, 0, 0], "item": { "article": "article-id1", "id": "id1", "product_group": "product_group1", "length/mm": 300, "width/mm": 200, "height/mm": 100, "weight/kg": 3.14, "sequence": 1 } "orientation": 0 }
NAMING CONVENTION.
Please name your packing plan file in the following way:{SUBMISSION_DATE}_ {SURNAME_SUBMITTER}_ {ALGORITHM_NAME}_ {TASK}.json
For example, 2023-01-22_kagerer_algorithm1_o3dbp.json.
Explanation of Evaluation
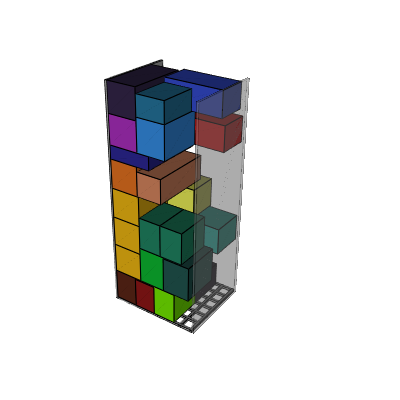
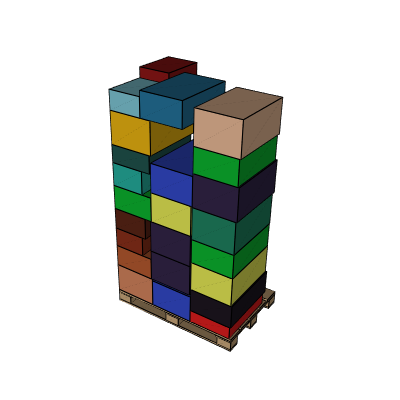
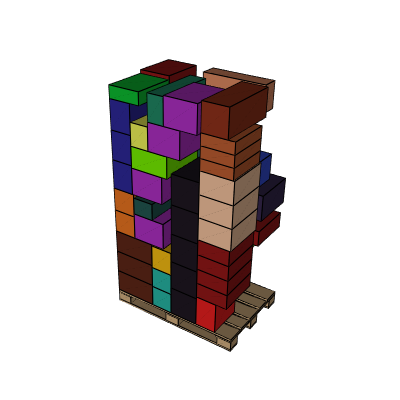
The score of an algorithm, which is decisive for the leaderboard’s ranking, is the percentage of stable palletized items within a certain height level.
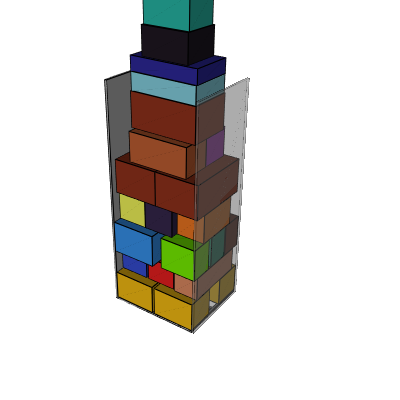
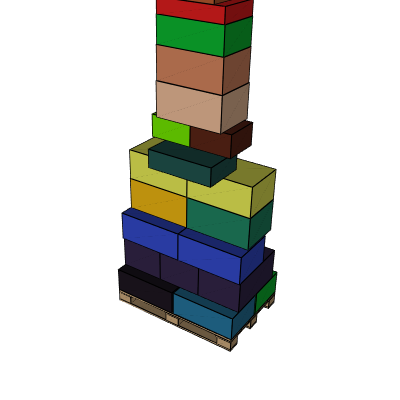
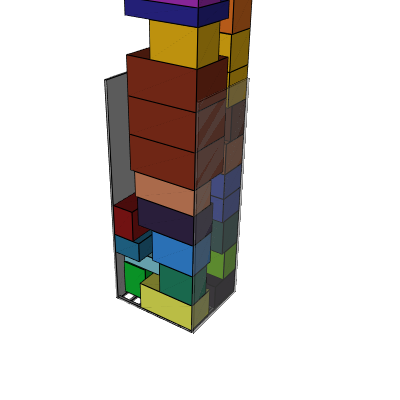
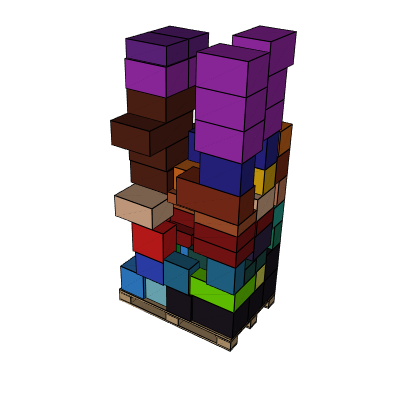
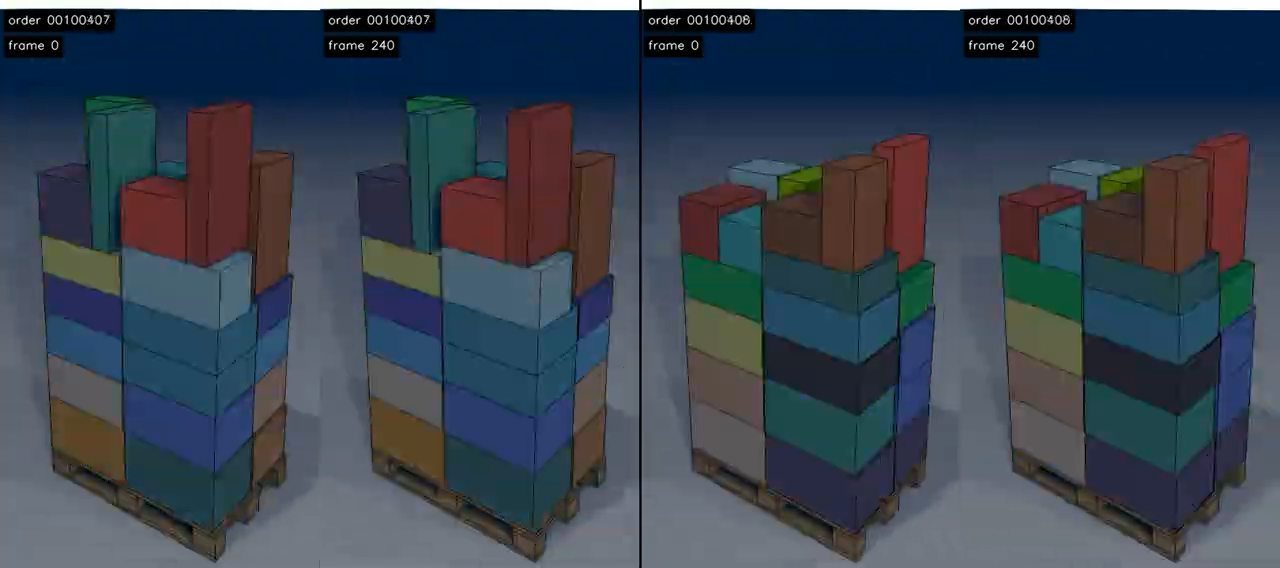
To this end, for each packing plan a stability check in Blender is carried out. The following video shows stability checks for four algorithms for order "00100408".
The stability check is successful, when any item’s movement in the height is less than 0.01 meters for 10 seconds. In the video, for xflp the stability check fails.
Consequently, the contribution of this packing plan to the overall rating of xflp is zero.
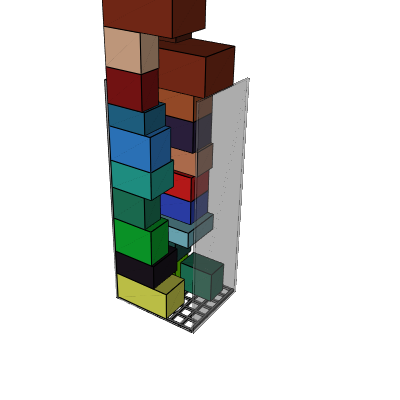
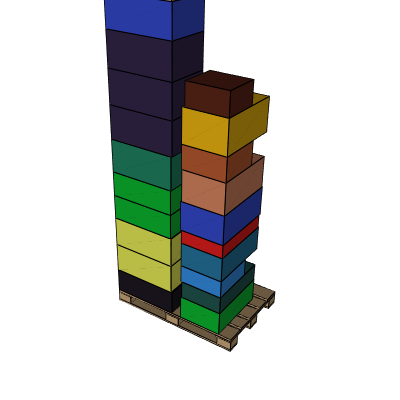
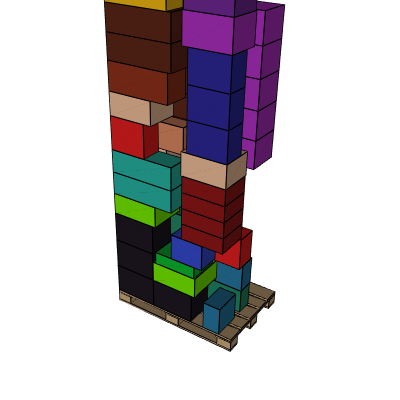
For the stable piles of Online-3D-BPP-PCT, O3DBP-3-2 and sisyphus, we have to determine the amount of items that are completely placed below the height level of 2 meters. As an example, this procedure is visualized for sisyphus’ packing plan in the following video.
Finally, the remaining items contribute to the rating of an algorithm.